| Herkunftsort: | China |
|---|---|
| Markenname: | Hwashi |
| Zertifizierung: | CCC/CE/ISO |
| Modellnummer: | HS-R6-08 |
| Min Bestellmenge: | 1/set |
| Verpackung Informationen: | Holzkiste |
| Lieferzeit: | 15-30 Arbeitstage |
| Zahlungsbedingungen: | L/C, D/A, D/P, T/T |
| After-sales Service Provided: | Engineers available to service machinery overseas | Name: | Hwashi Storage Rack Corner Welding Robot Unit |
|---|---|---|---|
| Driving Mode: | AC servo driving | Effective payload: | 8KG |
| Repeat Positioning Accuracy: | ±0.05mm | Motion Range: | ±360 degree |
| Max Speed: | 270 ° / s | Moving Radius: | 893 mm |
| Serve Life: | 8-10 years | ||
| Markieren: | Industrielle Schweißroboter mit Brunnendeckel,Industrielle Schweißroboter aus Edelstahl,Schweißrobotereinheit mit Brunnendeckel |
||
![]()

![]()
![]()

![]()
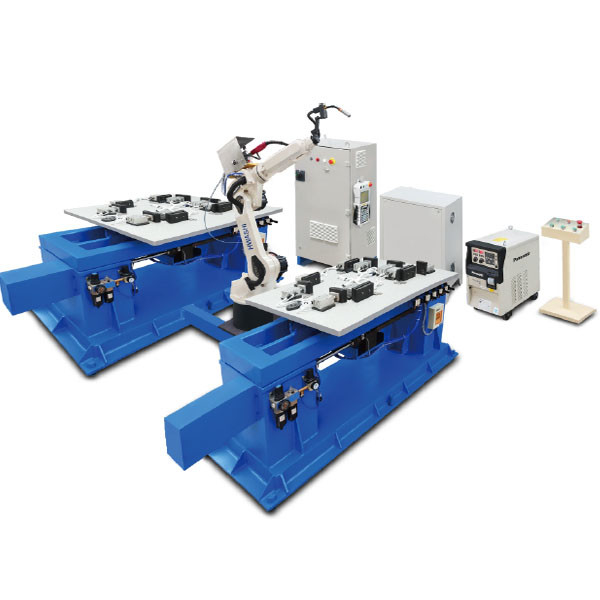
Projekthintergrund: Schweißrobotereinheit für Edelstahl-Brunnendeckel (eingesetzt bei einem der bekanntesten Brunnenhersteller in Indien)
Kundenanforderung:
1. Verwenden Sie einen Roboter, um Arbeitskräfte beim Schweißen zu ersetzen.Manuelles Be- und Entladen des Produkts.Einmalige Befestigung des Produkts an der Halterung.
2. Werkstückmaterial: Eisenstahl, Wandstärke: 0,8–1,2 mm;Größe: 300x300mm oder 600x600mm
3. Das Werkstück sollte abwechselnd auf der Vorder- und Rückseite geschweißt werden, um die Verformung zu reduzieren.
4. Der vordere Schachtdeckel und der hintere Schachtdeckel werden in einem separaten Roboter geschweißt.Akzeptieren Sie, den Brunnendeckel in mehreren Schritten zu verschweißen.
Lösungen:
1. Das komplette Schweißrobotersystem umfasst 2 Sätze HS-R6-08-Roboter mit 1,4 m Armlänge, 2 Sätze 350-A-MIG-Schweißgeräte, 2 Sätze automatischer Antikollisions-Schweißpistolen, 4 Sätze einachsiger vertikaler Rotationspositionierer, 2 Sätze Schweißpistolenreiniger und 4 Sätze Schweißvorrichtungen usw.
2. Um die Stabilität und Konsistenz der Schweißqualität zu gewährleisten, empfehlen wir die Ausrüstung mit einem Schweißpistolenreinigungsgerät.
3. Das automatische Schweißen erfolgt durch den sechsachsigen MIG-Schweißroboter.Die Zylinder oder Schnellspanner werden verwendet, um die Position des Produkts mit dem Hebelprinzip zu fixieren, um die Positionierungsanforderungen des automatischen Schweißens des Roboters sicherzustellen und so sicherzustellen, dass es an jeden Teil des Produkts geschweißt werden kann.Entsprechend den Anforderungen an die Produktionseffizienz sind zwei Sätze von Ein-Achsen-Positionierern konzipiert, einer zum Be- und Entladen des Werkstücks und einer zum Schweißen.
Arbeitsablauf:
1) Manuelles Laden des Werkstücks in die Vorrichtung im Positionierer Station 1;
2) Beginnen Sie mit dem Schweißen;
3) Die Roboter und Schweißmaschinen schweißen das Werkstück gemäß dem Voreinstellungsprogramm.
4) Schweißen abgeschlossen;
5) Während an Station 1 geschweißt wird, wird an Station 2 synchron das Werkstück be- und entladen.
6) Zyklusarbeit
Anwendungseffekt
1. Das Layout des Doppelstations-Positionierers ermöglicht ein kontinuierliches Schweißen über einen langen Zeitraum. Die Schweißeffizienz und die Schweißqualität wurden erheblich verbessert.
2. Der Positionierer realisiert die Werkstückklemmung auf einmal und realisiert automatisch das abwechselnde Schweißen der vier Ecken des Produkts, die Verformung wird effektiv kontrolliert.
3. Diese Maschine kann automatisches Schweißen durch manuelles Laden von Material erreichen.Es kann auch die Schweißqualität und Schweißeffizienz verbessern.Darüber hinaus können die Produktionskosten gesenkt werden.Das Problem der instabilen Qualität und der geringen Produktionseffizienz, die durch rein manuellen Betrieb verursacht werden, wurde gelöst.
4. Roboter ersetzen manuelles Schweißen.Die Schweißindustrie ist eine Hochrisikobranche. Hohe Temperaturen, Lichtbogenlicht und Schweißrauch haben gewisse Auswirkungen auf die körperliche und geistige Gesundheit der Arbeitnehmer.
5. Es ist ein unvermeidlicher Trend, Schweißroboter beim Schweißen durch Roboter zu ersetzen, was nicht nur der Marktförderung, sondern auch der Notwendigkeit einer technologischen Modernisierung dient.